
一、Otsu 的基本思想(类间方差最大)
假设一幅灰度图中只有两类像素:
前景:目标(如文字、物体)
背景:不是目标的部分
我们要找一个灰度阈值 tt,把图像分成两类:
类 0(背景):灰度 [0,t][0,t]
类 1(前景):灰度 [t+1,L−1][t+1,L−1],其中 LL 是灰度级数(一般 256)
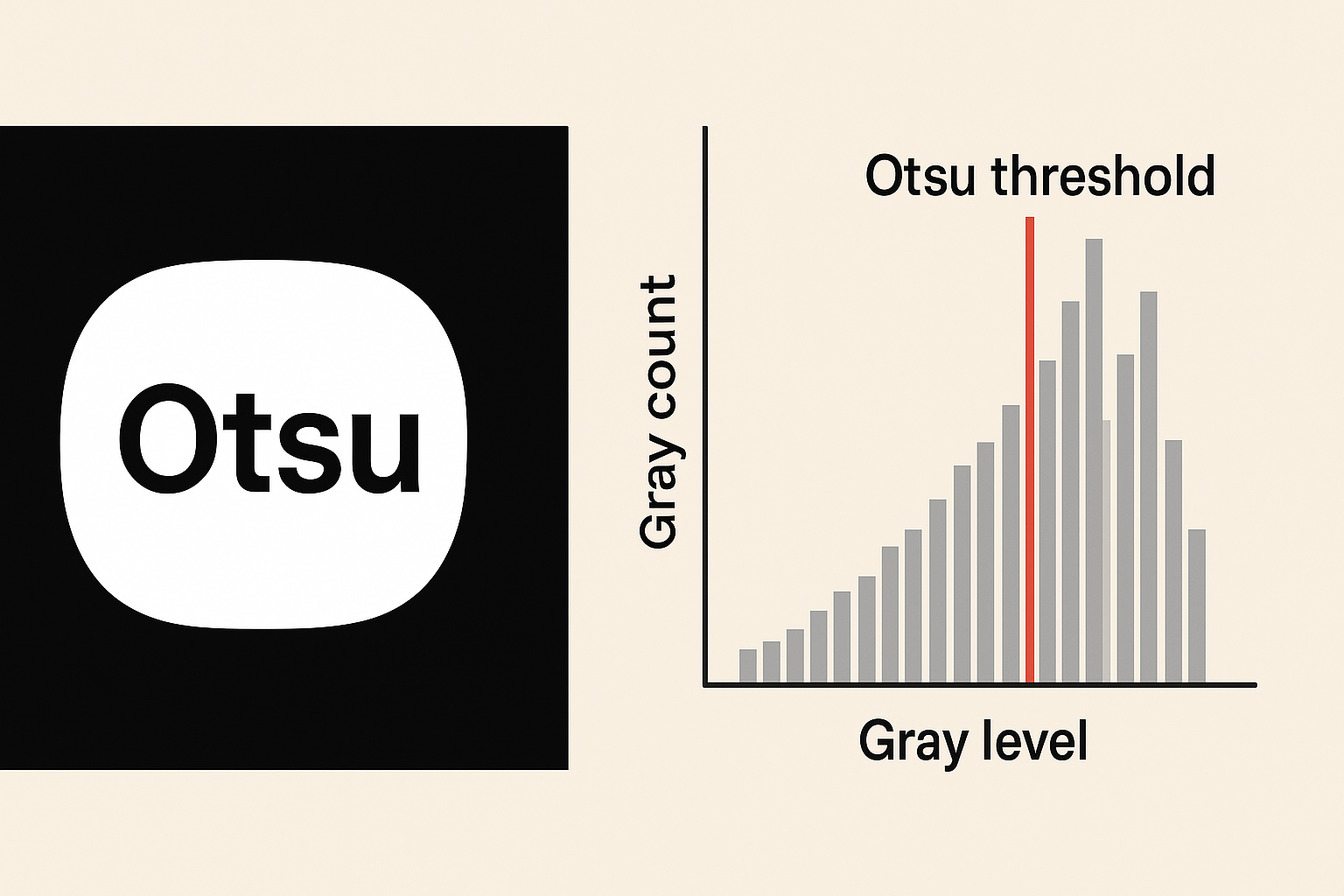
Otsu 的思想:
找到那个使类间方差(两类之间差异)最大的阈值。
二、数学公式(单阈值 Otsu)
设灰度级为 0,1,…,L−10,1,…,L−1,直方图为 h(i)h(i),总像素数为 NN。
概率分布
pi=h(i)N,i=0,…,L−1pi=Nh(i),i=0,…,L−1
给定阈值 tt,两类像素的概率(权重):
ω0(t)=∑i=0tpi,ω1(t)=∑i=t+1L−1piω0(t)=i=0∑tpi,ω1(t)=i=t+1∑L−1pi
两类的平均灰度:
μ0(t)=1ω0(t)∑i=0ti pi,μ1(t)=1ω1(t)∑i=t+1L−1i piμ0(t)=ω0(t)1i=0∑tipi,μ1(t)=ω1(t)1i=t+1∑L−1ipi
图像整体平均灰度:
μT=∑i=0L−1i piμT=i=0∑L−1ipi
类间方差(between-class variance)定义为:
σB2(t)=ω0(t) (μ0(t)−μT)2+ω1(t) (μ1(t)−μT)2σB2(t)=ω0(t)(μ0(t)−μT)2+ω1(t)(μ1(t)−μT)2
常用等价形式:
σB2(t)=ω0(t) ω1(t)(μ0(t)−μ1(t))2σB2(t)=ω0(t)ω1(t)(μ0(t)−μ1(t))2
算法目标:
三、Otsu 算法实现步骤(单阈值)
计算图像灰度直方图 h(i)h(i),并归一化得到 pipi
利用前缀和等方式快速计算:
ω0(t)ω0(t)、ω1(t)ω1(t)
μ0(t)μ0(t)、μ1(t)μ1(t) 或直接用累积和和 μTμT 计算
对每一个可能的阈值 tt(0 到 L-2,一般 0 到 254):
计算对应的类间方差 σB2(t)σB2(t)
取使类间方差最大的 tt 作为 Otsu 阈值
按此阈值对图像进行二值化:
g(x,y) = \begin{cases} 0, & \text{if } f(x,y) \le t, \\[4pt] 255, & \text{if } f(x,y) > t . \end{cases}
四、Matlab 示例代码
1. 使用 Matlab 自带 Otsu(graythresh + imbinarize)
% 读入图像(灰度图)
I = imread('input.png');
if size(I, 3) == 3
I = rgb2gray(I); % 若为彩色图像,转为灰度
end
% Matlab 的 Otsu 阈值:graythresh 返回的是 [0,1] 之间的归一化阈值
level = graythresh(I);
% 二值化
BW = imbinarize(I, level);
% 显示结果
figure;
subplot(1,2,1); imshow(I); title('Original');
subplot(1,2,2); imshow(BW); title(['Otsu (graythresh) level = ', num2str(level)]);
graythresh 的实现就是 Otsu 单阈值算法。注意它返回的是归一化阈值(相对于 0–1),实际灰度阈值为 T = level * 255。
2. 手写 Otsu 算法(示例实现)
下面这段代码不依赖 graythresh,按公式自己算一遍阈值。
% 读入图像
I = imread('input.png');
if size(I,3) == 3
I = rgb2gray(I);
end
% 转 double 方便计算(也可以不转)
I = double(I);
% 参数
L = 256; % 灰度级数 0~255
N = numel(I); % 像素总数
% 1. 计算直方图 h(i)
[counts, ~] = imhist(uint8(I), L); % counts: 256x1
p = counts / N; % 概率分布 p_i
% 2. 累计概率 ω(k) 和 累计均值 μ(k)
omega = cumsum(p); % ω_k
mu_k = cumsum((0:L-1)' .* p); % μ_k 的分子部分
mu_T = mu_k(end); % 总均值 μ_T
% 3. 计算每个可能阈值 t 的类间方差 σ_B^2(t)
sigma_b2 = zeros(L, 1);
for t = 1:L
if omega(t) == 0 || omega(t) == 1
sigma_b2(t) = 0;
else
sigma_b2(t) = (mu_T * omega(t) - mu_k(t))^2 / (omega(t) * (1 - omega(t)));
end
end
% 4. 找到最大类间方差对应的阈值 t*
[~, idx] = max(sigma_b2);
T = idx - 1; % Matlab 索引从 1 开始,对应灰度 0~255,所以减 1
fprintf('Otsu threshold = %d\n', T);
% 5. 按 T 进行二值化
BW_manual = I > T;
% 显示结果
figure;
subplot(1,3,1); imshow(uint8(I)); title('Original');
subplot(1,3,2); imshow(BW_manual); title(['Manual Otsu, T = ', num2str(T)]);
subplot(1,3,3); imhist(uint8(I)); hold on;
line([T T], ylim, 'LineWidth', 2); title('Histogram with Otsu T');
五、Otsu 算法的特点
优点
无参数:不需要手工指定阈值,自动从数据中估计;
实现简单:只涉及直方图、累积和,计算高效;
对于前景和背景灰度分布差异较明显、近似双峰的图像效果很好;
被广泛集成到 OpenCV、Matlab 等库中,工程实践非常常见。
局限性
默认是单阈值二类分割,如果图像存在多类(多峰直方图)会不够理想;
假设背景和前景在直方图上区分明显,如果图像对比度很低或噪声很多,效果会下降;
标准 Otsu 是全局阈值,对光照不均匀的图像效果一般(可用局部/自适应方法改进)。
六、常见扩展与变体
多阈值 Otsu(Multi-level Otsu)
不只找一个阈值,而是找多个阈值 t1,t2,…t1,t2,…,将灰度分成多类,每个类之间的类间方差总和最大。
计算复杂度会显著增加(阈值组合数量多),常配合搜索优化或启发式算法。二维 Otsu(2D Otsu)
不只考虑像素本身的灰度,还加入邻域平均、梯度等信息,用二维直方图计算最佳阈值,能更好对抗噪声,但运算量更大。局部/块级 Otsu
将图像分成小块,对每块单独使用 Otsu 得到局部阈值,适用于光照不均、阴影较重的场景。与其它方法组合
如先做滤波、直方图均衡或对数变换,再用 Otsu;或 Otsu 与形态学处理一起使用,提高分割质量。